

Ijraset Journal For Research in Applied Science and Engineering Technology
Development of an IOT based Solenoid Controlled Pressure Regulation System for Precision Sprayer
Authors: Saha D., Padhihry M., Barbhuiya J.A., Chakraborty T., Sethi L.N.
DOI Link: https://doi.org/10.22214/ijraset.2023.55103
Certificate: View Certificate
Abstract
In recent years, Precision Agriculture has embarked a promising role in augmenting agricultural production and various farm mechanization. The present research was conducted to design and develop a Precision Spraying System (PSS) that is controlled by an Automatic Control System (ACS). PSS was equipped with micro-controller (NodeMCU), an analog pressure regulator, solenoid valve, diaphragm pump coupled with 12V DC motor; operated on a Iot platform BLYNK. A 3D printed full cone nozzle (0.2 mm orifice dia., cone angle of 95°) was designed to achieve desired spraying efficacy as per the canopy area and the need of the crop cultivated. Integration of PSS with ACS, intrigues a proper regulation on the valves (24V, 7.92W), the pump speed, pressure head and flow rates. The spray patternator test was conducted to evaluate the Delay Time Losses (DTL), application losses, effective spraying height and pressure. The test was conducted for 4 sets of increasing pressure (5.46, 6.24, 6.86 and 7.80 bar) and 3 sets of decreasing nozzle heights (890, 760 and 620 mm). The results revealed that the maximum average discharge collected from the Patternator tray was 0.45L/min (at pressure 7.80 bar; height 620 mm) and the minimum average discharge collected was 0.26 L/min (at pressure 5.46 bar; height 890 mm). The spray angle was found to vary from 72 to 82° and the percent (%) loss in discharge was estimated to maximum of 49.02% (at height 890 mm) and the minimum value of 11.76% (at height of 620 mm) suggesting possible wind drift with increasing nozzle height. Thus, the designed PSS is propitious to forefend all the ill effects of conventional spraying and it significantly reduces the DTL to 0.5 sec.
Introduction
I. INTRODUCTION
Mechanization in Agriculture, though revolve around fulfilling the brimming needs of the overwhelming population, is still harboring several shattering problems. In this modern era of technological advancement, it is inevitable that the poor farmers of the nation are gasping their breath off to meet the basic amenities of life even. The fact that agricultural land is limited, the miserable plight of small-scale farmers has no boundaries, and agricultural trade has a large share in country’s GDP, has addressed the concept of Precision Farming. The main purpose of Precision farming is to increase the quality of production and concurrently to reduce losses thereby demarcating the overall estimated costs. It aims to prevent wastage of resources, minimize environmental pollutions, and enhance the gross returns of the product with the use of rising technologies and control system [1]. Precision farming can be incorporated almost in every agricultural operations starting from tillage to harvesting. With technological revolution, there has been a significant progress in electronics and it is ardent to make use of devices such as sensors, semiconductors, microcontrollers, software, internet applications; in best possible way [2]. Only then Agricultural sector will be fronting the challenges of meeting the predicted demands of about 9.8 billion humans (in 2050) during the next three decades [3]. Furthermore, the use of low-cost Automatic Control System (ACS), tracking system and management system are also getting common [4].
Precision Agriculture is a technique of many tedious processes and practices, one of which is precision spraying [5]. Spraying is one of the vital operations in Agriculture. It is basically done to increase the yield, growth of crops, pest control and other relevant productive purposes. The fundamental functions of typical agricultural sprayers are: atomization of liquids, flow regulation and uniform distribution [3]. A Precision Spraying System (PSS) is one that comes up with certain objectives of uplifting the conventional spraying methods to the next level. Integration with electronic components and IOT platform, a PSS aims to curb out all the possible methodological and economic hindrances that a farmer faces in the field [5].
The purpose of this study is to design a Precision Spraying System (PSS) with a control system that can spray automatically based on the application dosage, along with design of a 3D printed plastic nozzle and test the performance of the same. In further research, this PSS could be applied to autonomous spraying robots or mounted on All Terrain Vehicles (ATVs).
A. Characteristics of PSS:
Precision spraying technology, now-a-days is one of the most emerging and eye-catching technological approach in developed countries like USA, Japan, Germany etc. in terms of research and development (R&D sector). Huge investments are made on more mature map-based and real time sensing technology [6]. Some of the salient features of PSS are:-
- High Compatibility: According to the characteristics of the crops, canopy area of the crops, and spray requirements; the flow rates and corresponding pressure can be checked and regulated through IoT platform [3].
- Operation Losses: PSS is potent enough to eradicate Delay Time Losses (DTL) significantly during switch ON and switch OFF; along with reducing turning losses.
- Pollution Control: A Precision sprayer prevents excessive or unwanted ejection of spray fluids from the nozzle orifice thereby limiting the toxic and synthetic chemicals to drain through the nearby water passage.
- Cost Effective: Due to precise application of expensive pesticides and fertilizer, it justifies to be an economical measure for the farmers in terms of cost savings by wiping out wastage [3].
- Operator’s Safety: Safety of operators and farmers is ensured through the precise and controlled dosage of spraying chemicals in appropriate droplet size at requisite spots (as the chemicals can burn the sensitive areas, which is fatal).
II. METHODOLOGY
This research was conducted in the Farm Machinery and Power Testing lab of Department of Agricultural Engineering, Assam University, Silchar, India. The equipments used in this study include different hardware components which were digitally operated on the IoT platform “BLYNK”. The block diagram of the designed system is shown in Fig. 1.

- Pressing the 'ON' Button in the control panel (BLYNK-Iot) activate the NodeMCU to switch ON the Pump-Motor Unit.
- At this, the Solenoid Valve (SV- I) opens and keep Solenoid Valve (SV-II) closed to enable water circulation through the bypass line hose pipe back to the sprayer tank.
- The pressure transducer sensor continuously monitors the water pressure in the hose-pipes.
- Once the sensor detects sufficient pressure for atomization, SV-I gets closed and SV-II opens to spray at desired pressure.
- To stop spraying, the OFF button is pressed on BLYNK that instruct the microcontroller to turn OFF the Pump.
- The sudden pressure drop again opens SV-I and closes SV-II, allowing the remaining water in the hose pipes to drain back to the sprayer tank through the bypass passage.
- The system prevents Delay Time Losses (DTL) during ON/OFF operations.
III. HARDWARE REQUIREMENTS
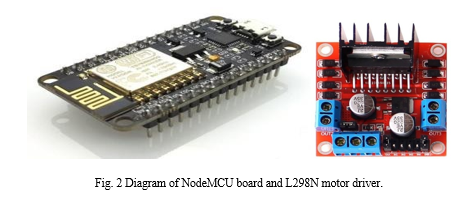
- Microcontroller: The NodeMCU ESP8266 module was chosen as it is an open source IOT platform with inbuilt software and hardware development environment. The microcontroller unit has an operating voltage in the range 3.3-5 V and input limit up to 9V. It has 8 digital I/O pins and 1 analog input pin with DC current per input pin of 200mA. The unit has a wifi band of 2.4GHz and transfer rate 110 – 460800 bps.
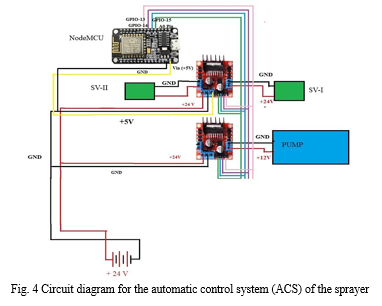
- Motor Driver: The L298N is a dual-channel H-Bridge motor driver, ideal for driving DC motors or any load. It is connected to an input +12V main supply battery. In the circuit, two L298N drivers are connected in parallel to drive the Pump and the two solenoid valves respectively connected to the output channels. The transistor in the driver switches the hardware corresponding to desired signals from the pins connected to NodeMCU board. Moreover, a 5V regulator is connected to the IC of the driver that converts the input 12V to 5V and then supply to the NodeMCU board (Vin). The driver draws 2A current and the logic works on 5V with 0-36mA current.
3. Pump-Motor Unit: The pump-motor unit basically comprises of a 12 V DC motor which is coupled with a Diaphragm pump. The diaphragm pump eliminates the use of a pressure regulator as it maintains a constant peak pressure of 0.78 MPa with a cutoff voltage of 14 V. The pump draws water from the 30L sprayer tank and produces a theoretical discharge of about 3.6 L/min.
4. Pressure transducer sensor: The pressure transducer sensor detects the water pressure in hose pipes and transmits analog electrical signal corresponding to that pressure. It adopts Precision Compensation Technology to measure up to 0.8 MPa pressure. The sensor gives a digital output in the range of 0.5V to 4.5V while operating at 5V DC.
5. Solenoid valve: A solenoid valve is an electromechanically-operated valve comprising of a coil of wire, the housing and a moveable plunger (armature). It is the vital component of the precision sprayer. Two solenoid valves, SV-I and SV-II are used; one regulates the bypass line and the other the sprayer nozzle respectively as per the change in pressure (P<0.78 MPa or P>=0.78 MPa). The nominal voltage for the valve is 24V DC, with a rated power of 7.92 W and 7.70mm of inner diameter for attaching with the PTFE hosepipes.

6. Sprayer nozzle: A full cone sprayer nozzle was designed in Auto CAD Fusion 360 software and 3D printed using Creality Ender 3D printer, China. The printed nozzle had a cone angle of 95? with orifice size of about 2mm. The swirl plate was about 2mm thick with a diameter of 13.14 mm. The outer diameter for pipe attachment was about 6.192 mm.
7. Accessories: PTFE hose pipes and fittings with 6.75 mm (OD) and 4 mm (ID) were used for the passage of water in the precision sprayer. These were connected to different components and the 30L sprayer tank.
Complete Circuit diagram is shown in Fig. 4.
IV. SOFTWARE REQUIREMENTS
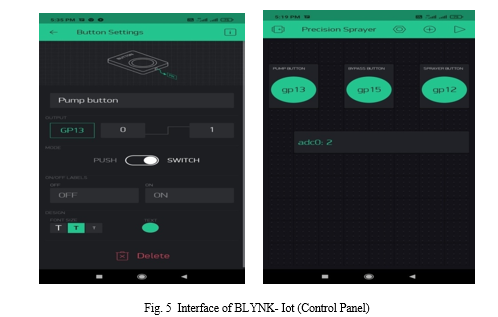
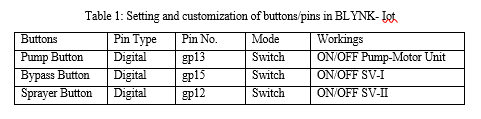
BLYNK-Iot (Fig. 5) was preferred as the user interface (Control panel) to control, interact and monitor data of Iot devices through a set of arduino libraries and a cloud server. It was connected to the microcontroller (ESP8266 board) through Wi-Fi and could be operated from remote areas. It provided an easy access to the project via an android mobile phone. In the app, there were widgets for different types of buttons, slider, joystick, display elements, graphs etc. to regulate the data INPUT and OUTPUT. The logics were fed/ implemented in C++ code, accessing the BLYNK Library. The control panel was designed with 3 different types of pins: the Digital Pins (gp0-gp16), Virtual Pins (V0 – V255) and Analog pins(adc0) for transferring data to the microcontroller as well as for storing variables like pressure (as sensed by the Pressure Transducer Sensor).
V. PERFORMANCE TESTING
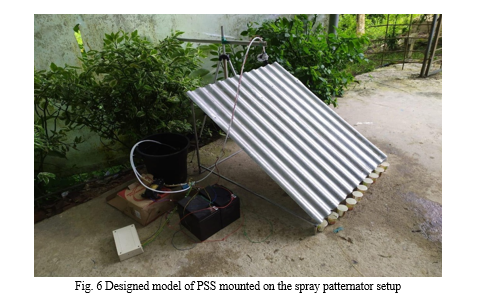
A. Spray Patternator
A mechanical set up of spray patternator was custom fabricated for mounting nozzles for spray pattern tests as per the specifications mentioned by [7], [8] and [9] with slight modifications. Several spraying parameters like the spray distribution, spray pattern, cone angle, discharge loss (%) etc. could be determined [8]. A patternator tray of length 1016 mm, width 800 mm and slant angle 30° was considered for the experiment. The collecting tube spacing was kept at 80 mm.
B. Testing Procedures
- The test was conducted for 4 sets of increasing pressure (5.46, 6.24, 6.86 and 7.80 bar) and 3 sets of decreasing nozzle heights (890, 760 and 620 mm).
- For first set, the nozzle was adjusted at 890 mm so that spray should cover a maximum width on patternator tray.
- 2-3 drops of Methylene Blue were poured over water in the sprayer tank and mixed thoroughly.
- Motor was set to 12V main supply (battery) to build a pressure of 5.46 bar for spraying.
- The volumes received in the uniformly placed collecting tube were measured with a 50mL graduated cylinder to calculate the discharge (ml/min).
- The varying spray volume collected in the tubes suggested the spray distribution over areal coverage zone.
- Separately the actual discharge was also evaluated by collecting spray volume directly from nozzle into a beaker for a specified time duration (5 s.).
- The percentage loss in discharge collected in patternator and optimum spray angle were also calculated.
- Similarly, the spraying performance for other sets of pressure and height were also determined.
VI. RESULTS AND DISCUSSION
The designed sprayer integrated with automatic control system (ACS) was found to intrigue a proper regulation on the valves (24V, 7.92W), the pump speed, pressure head and flow rates as per the canopy area and the need of the crop under cultivation. The sprayer executed a uniform full cone spraying pattern. The delay time loss (DTL) was found to be significantly reduced to 0.5 s (negligible) during switch ON/OFF the sprayer-pump. The results of the patternator spray test are discussed as under.
Table 2: Variation of spraying parameters with nozzle height and Pump pressure
|
Set No. |
Nozzle Height (mm) |
Nozzle Pressure (bar) |
Spray Angle (°) |
Avg. Discharge (L/min) |
Discharge loss (%) |
|
A |
890 |
5.46 |
72.2 |
0.26 |
49.02 |
|
B. |
890 |
6.24 |
74.1 |
0.32 |
31.62 |
|
C. |
890 |
6.86 |
77 |
0.31 |
42.78 |
|
D. |
890 |
7.80 |
82 |
0.29 |
41.26 |
|
E. |
760 |
5.46 |
72 |
0.44 |
18.89 |
|
F. |
760 |
6.24 |
74.2 |
0.33 |
32.80 |
|
G. |
760 |
6.86 |
77.4 |
0.32 |
35.71 |
|
H. |
760 |
7.80 |
81.5 |
0.34 |
30.92 |
|
I. |
620 |
5.46 |
72.1 |
0.39 |
20.73 |
|
J. |
620 |
6.24 |
74 |
0.41 |
12.82 |
|
K. |
620 |
6.86 |
78 |
0.44 |
16.86 |
|
L. |
620 |
7.80 |
81.8 |
0.45 |
11.76 |
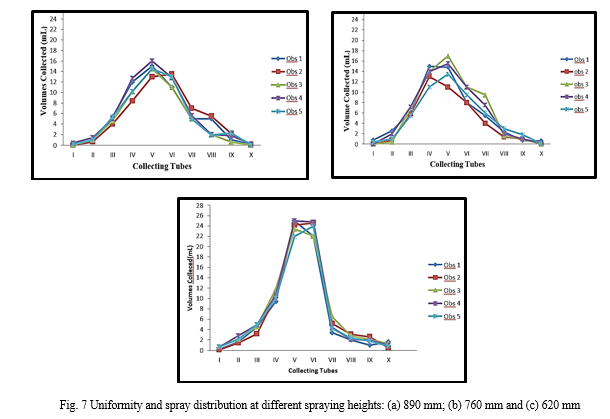
From the spray patternator test (Fig. 7), it was observed that:
- The maximum collected discharge was 0.45 L/min for Set L (H=620mm, P= 7.80 bar) and the minimum collected discharge was 0.26 L/min occurred for Set A (H=890 mm; P= 5.46 bar).
- The spray angles do not vary much with nozzle heights but it significantly varies with pressure. The spray angle drastically increases with increase in pressure reaching maximum of 82° at P=7.80 bar from a minimum angle of 72° at P= 5.46 bar.
- The percentage loss in discharge noticeably decreases with the decrease in the mounted height of the nozzle. The value varies from a maximum of 49.02% discharge loss at a Nozzle height of 890 mm to a minimum of 11.76% discharge loss at a nozzle height of 620 mm. This might be due to the prevailing wind drift and other losses that enhanced with the increase in nozzle mounting height.
- From graphs (Fig.6), the spray distribution over patternator tray also revealed that maximum volume was achieved at the least mounting height of 620mm, however a more profound uniform spray distribution pattern was observed at greater mounting heights (890 and 760 mm).
- The ACS was able to apply spray solution with a maximum accuracy of around 90% of volume.
Conclusion
Precision sprayer integrated with solenoid-controlled ACS has been successfully implemented and tested on the spray patternator. It was developed to operate on an Iot platform BLYNK with NodeMCU ESP8266 module through C++ programming. Application of pressure sensors and solenoid valves to the PSS makes the system economically adaptable with the environment. With the development of precision spraying, discharge losses and DTLs can be greatly eradicated in the agricultural farm. With fully-automated farms in the future, precision agriculture would be a promising take. This also enables the farmers to just supervise the Iot devices and operate them from remote distances with classified accuracy and precision. The project can be enhanced to all kinds of crops of varying heights, nutritional uptakes and canopy areas. Hence, it can be applicable to the real time agricultural field.
References
[1] Vrchota, J., M. Pech, and I. Švepešová, Precision Agriculture Technologies for Crop and Livestock Production in the Czech Republic. Agriculture, 2022. 12(8): p. 1080. [2] ZÜREY, Z., S. BALCI, and K. SABANCI, Automatic nozzle control system with ultrasonic sensor for orchard sprayers. European Journal of Technique (EJT), 2020. 10(2): p. 264-273. [3] Dou, H., et al. Application of variable spray technology in agriculture. in IOP Conference Series: Earth and Environmental Science. 2018. IOP Publishing. [4] ?RSEL, G., Design and Implementation of Low-Cost Field Crop Sprayer Electronic Flow Control System. Gazi University Journal of Science, 2021: p. 1-1. [5] Sontakke, S.S., et al., Solar powered pesticide sprayer using iot. International Research Journal of Modernization in Engineering Technology and Science, 2020. 2(6): p. 408-412. [6] Shen, Y., et al., Development of a laser-guided, embedded-computer-controlled, air-assisted precision sprayer. Transactions of the ASABE, 2017. 60(6): p. 1827-1838. [7] Subr, A., et al., Testing the uniformity of spray distribution under different application parameters. 2017. [8] Mustafid, M., I. Subrata, and G. Pramuhadi. Design of Automatic Spraying System for Liquid Pesticide Application on Cabbage Cultivation. in IOP Conference Series: Earth and Environmental Science. 2020. IOP Publishing. [9] Sehsah, E., Vertical patternator for evaluation of the hydraulic sprayers. Misr Journal of Agricultural Engineering, 2016. 33(4): p. 1239-1254.
Copyright
Copyright © 2023 Saha D., Padhihry M., Barbhuiya J.A., Chakraborty T., Sethi L.N.. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET55103
Publish Date : 2023-07-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online